この記事の内容
- nucleo-L496ZGはmbedではシリアルで何かを表示させてデバッグすることしかできないことが分かった為、STマイクロ純正のIDEを使用することにしました。
- mbedできちんとデバッグに対応しているnucleoシリーズはnucleo-B55RG, G071RB, F429ZI, F446ZE, F303RE, F411RE, F401RE, F103RBとのこと(2022/4/14現在)。MbedのボードのページのFilterの一番下のdebugでフィルタしました。
- 今回はLEDを点滅させつつ、内部変数のモニタをしていきます。
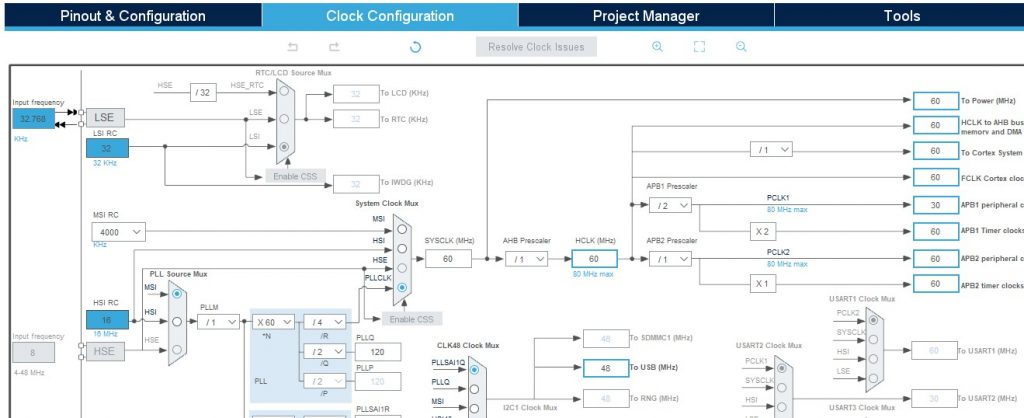
STM32CubeIDE
PINの機能割り当てや名前つけ、クロックの設定をGUIでできることが大きな特徴かと思います。GUI画面で設定変更後保存すれば、自動で保存内容に合わせたコードを生成してくれる為、コーディングの手間が省けます。自動で生成されたコードのうちUSERが書きこんでも良い部分に書かれたコードはコード生成をやり直しても保持されます。

STM32CubeIDE – STM32用統合開発環境 – STMicroelectronics
プロジェクトの作成
プログラムの作成とデバッグをしていきます。こちらのページを見て進めていったのですが、プログラムがうまく動かなかったので、修正版を記載していきます。
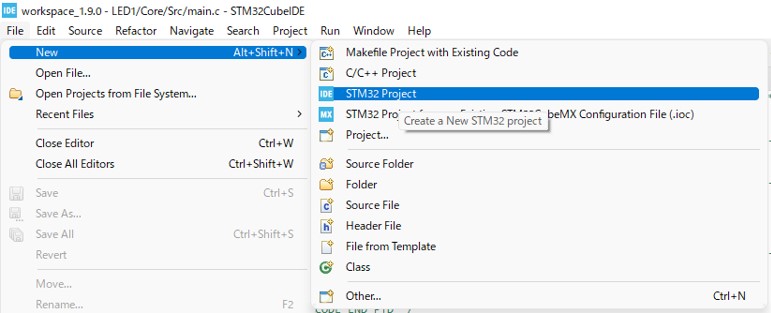
①まずは新しいプロジェクトを作ります。New>STM32Projectです。
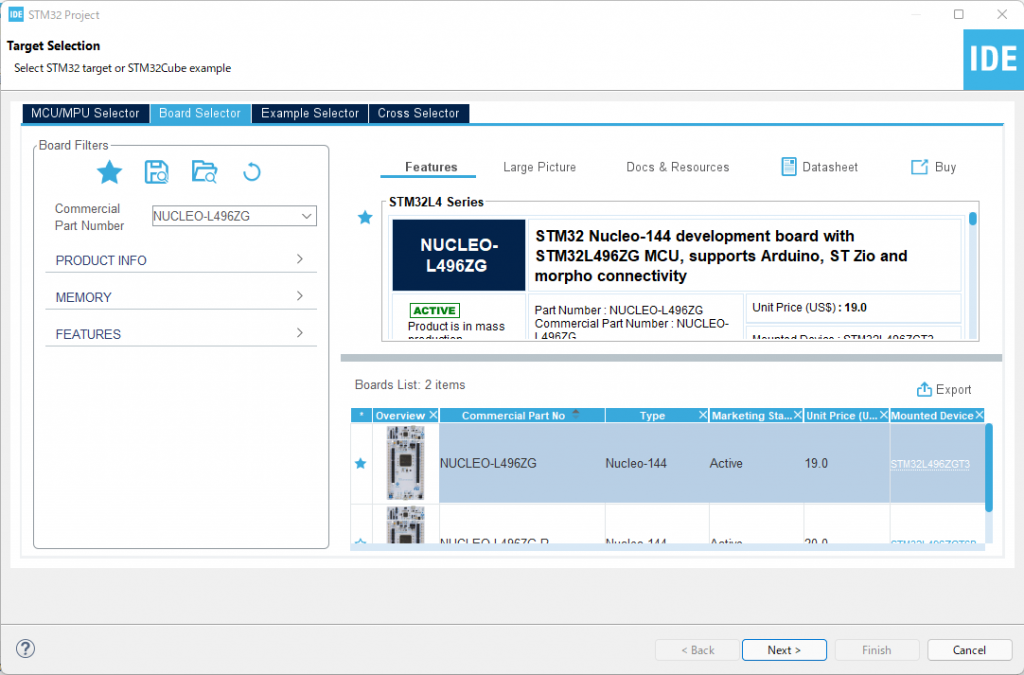
②お手持ちのボードやマイコンを選択します。今回はBoardSelectorタブから「NUCLEO-L496ZG」を選びました。右下の表の対象ボードのところを選択すると、Nextボタンを押せるようになります。
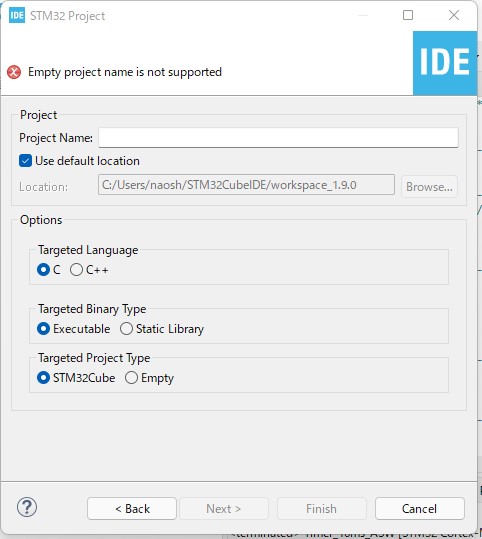
- その後はプロジェクト名の入力です。他はデフォルトの設定のままでOKです。プロジェクト名を入れた後にはすべての設定をデフォルトにしますかと聞かれるのでYesを選択します。

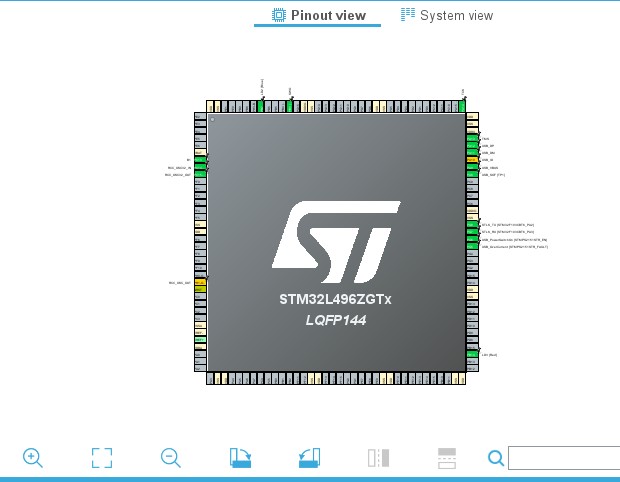
マイコンのPINの設定とPIN設定変更後のコード生成
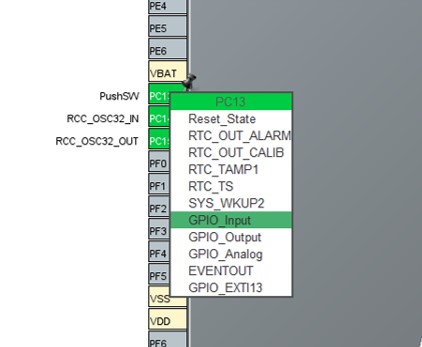
ピン設定をします。今回はユーザーボタンを押したらLEDが5回点滅するというプログラムにしますが、そこでLEDとユーザーボタンにつながっているPIN設定をする必要があります。PB7にLEDが割り当てられており、こちらはデフォルトでOKです。ユーザーボタン入力PC13に割り当てられており、こちらはGPIO_Inputに変更しました。また、これらのPINの呼び出しにPINの名称を使うことができ、あとで出てくるプログラムでもこのPINの名称を使いますので、ユーザーボタンの方は、右クリックして「EnterUserLabel」をクリックし、「PushSW」という名前に変更します。
| 機能 | PIN | 名称 | GPIO設定 |
| ユーザーボタン | PC13 | PushSW | GPIO_Input |
| LED点灯 | PB7 | LD2 | GPIO_Output |
PIN設定を変えたら「Ctrl+s」で保存しましょう。保存するとその内容でコード生成するか聞かれますので、Yesを選択します。
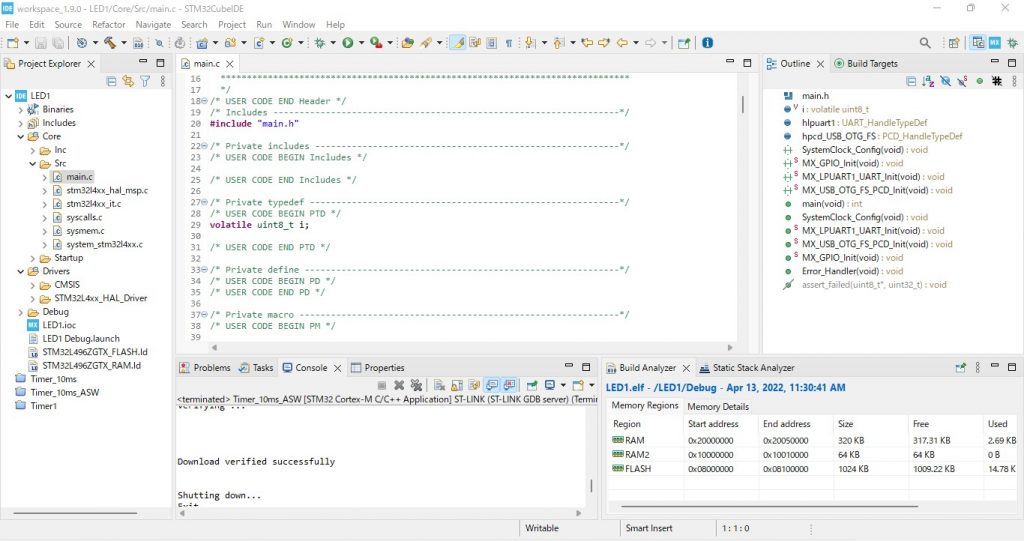
生成されたコードには下記のようにUSERCODE BEGINとUSER CODE ENDのコメントが記載されています。このコメントの間に書かれたコードはPINの機能を変更した後、再度コードを生成しても保持されます。
int main(void)
{
/* USER CODE BEGIN 1 */
//ここに記載した内容は保持されます。
/* USER CODE END 1 */このような場所です。
メインのプログラムの記載
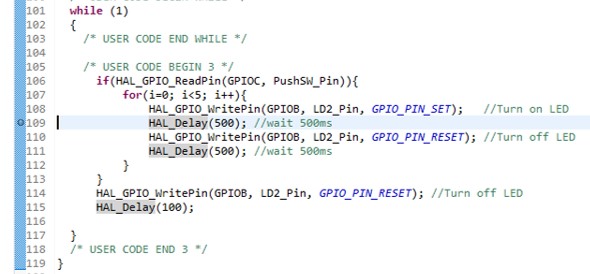
USERボタンを押した場合にLEDが5回点滅するプログラムを作成するために、下記のようにUSER CODE BEGIN PVと、while文の中のUSERCODE3に記載します。
/* USER CODE BEGIN PV */
volatile uint8_t i;
/* USER CODE END PV */
// ----- 省略 -------
int main(void)
{
// ----- 省略 -------
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(HAL_GPIO_ReadPin(GPIOC, PushSW_Pin)){
for(i=0; i<5; i++){
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_SET); //Turn on LED
HAL_Delay(500); //wait 500ms
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_RESET); //Turn off LED
HAL_Delay(500); //wait 500ms
}
}
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_RESET); //Turn off LED
HAL_Delay(100);
}
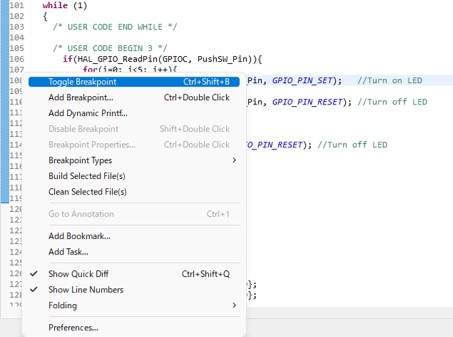
/* USER CODE END 3 */この後Debugも行いますので、「HAL_Delay(500); //wait 500ms」の行で右クリックして「Toggle Breakpoint」をクリックして、ここにブレークポイントを作ります。ブレークポイントとはプログラムの実行を一時停止する為のマーカーのようなものです。行のところに●がつけばOKです。
ビルドとデバッグ
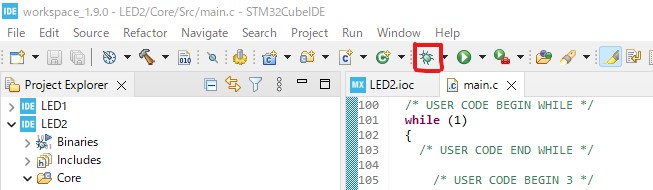
それではデバッグをしていきます。パソコンにNUCLEOを接続した状態で、虫マークのdebugボタンを押します。本来はビルドを先にするのですが、debugボタンを押すだけでビルドしてマイコンにプログラムを書きこんでくれます。
デバッグを押すとまずビルドが始まります。その後初回のデバックを押した際は下の図のような設定画面が出ます。

そのままOKを押します。
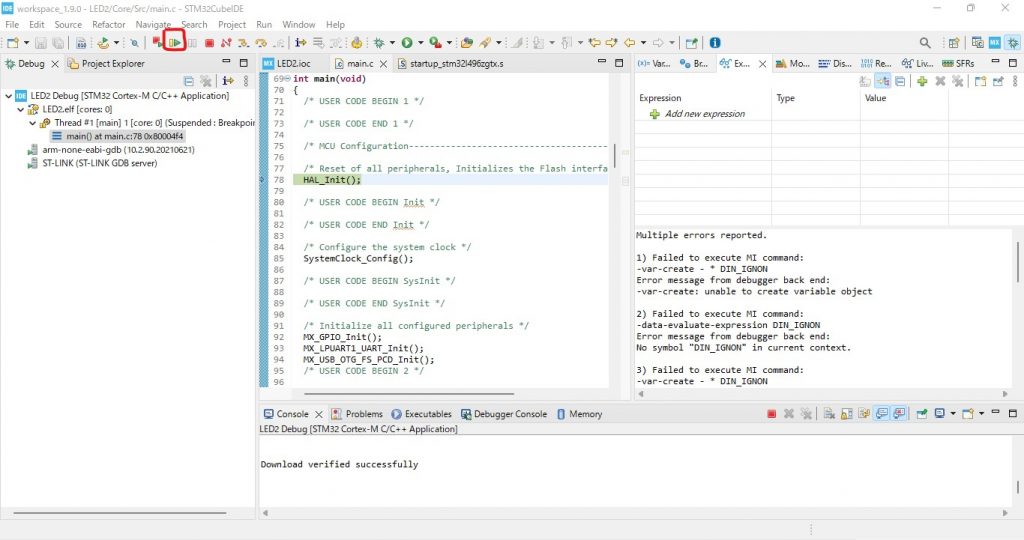
すると次の画面が出てきて、まずはHAL_Init()で止まると思います。黄色の四角と緑の三角が組み合わさったアイコンのResumeボタンを押して次に進みます。
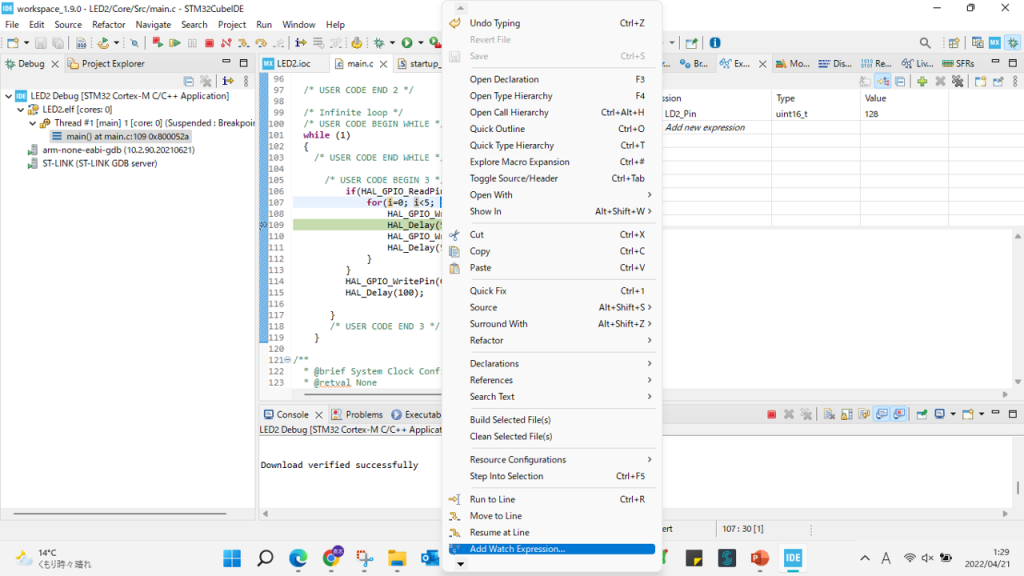
この状態でNUCLEOのボードにある青色のユーザーSWを押してみてください。LED2(青色)が点灯して、設定しておいた「HAL_Delay(500); //wait 500ms」のブレークポイントで処理が止まります。ここでResumeをクリックすると処理が進むのですが、ここで変数の状態を見てみます。まずはプログラム上の「i」を選択してマウスを選択したところに持って行ってみましょう。ウインドウが表れて、変数の中身を見ることができます。また、右クリックして「Add Watch Expression」を押せば右側のWatch Variableに変数が追加されます。
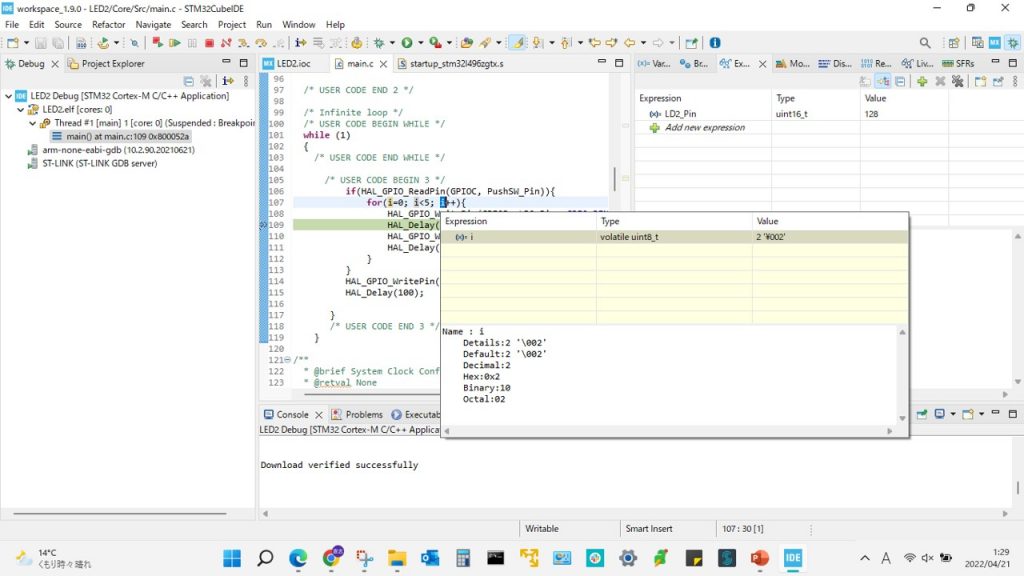

Expressionで変数の状態を確認しながらコードを進めることができます。
今回はここまでです。ご覧いただきありがとうございました。
最後に今回使ったプログラム全体を載せておきます。このプログラム内にPIN設定も入っているので、nucleo-L496ZGのボードであれば、このプログラムをそのままビルドしてデバッグしても動くはずです。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef hlpuart1;
PCD_HandleTypeDef hpcd_USB_OTG_FS;
/* USER CODE BEGIN PV */
volatile uint8_t i;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_LPUART1_UART_Init(void);
static void MX_USB_OTG_FS_PCD_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_LPUART1_UART_Init();
MX_USB_OTG_FS_PCD_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(HAL_GPIO_ReadPin(GPIOC, PushSW_Pin)){
for(i=0; i<5; i++){
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_SET); //Turn on LED
HAL_Delay(500); //wait 500ms
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_RESET); //Turn off LED
HAL_Delay(500); //wait 500ms
}
}
HAL_GPIO_WritePin(GPIOB, LD2_Pin, GPIO_PIN_RESET); //Turn off LED
HAL_Delay(100);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Configure LSE Drive Capability
*/
HAL_PWR_EnableBkUpAccess();
__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSE|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.LSEState = RCC_LSE_ON;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = 0;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_6;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLM = 1;
RCC_OscInitStruct.PLL.PLLN = 71;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV6;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
/** Enable MSI Auto calibration
*/
HAL_RCCEx_EnableMSIPLLMode();
}
/**
* @brief LPUART1 Initialization Function
* @param None
* @retval None
*/
static void MX_LPUART1_UART_Init(void)
{
/* USER CODE BEGIN LPUART1_Init 0 */
/* USER CODE END LPUART1_Init 0 */
/* USER CODE BEGIN LPUART1_Init 1 */
/* USER CODE END LPUART1_Init 1 */
hlpuart1.Instance = LPUART1;
hlpuart1.Init.BaudRate = 209700;
hlpuart1.Init.WordLength = UART_WORDLENGTH_7B;
hlpuart1.Init.StopBits = UART_STOPBITS_1;
hlpuart1.Init.Parity = UART_PARITY_NONE;
hlpuart1.Init.Mode = UART_MODE_TX_RX;
hlpuart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
hlpuart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
hlpuart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&hlpuart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN LPUART1_Init 2 */
/* USER CODE END LPUART1_Init 2 */
}
/**
* @brief USB_OTG_FS Initialization Function
* @param None
* @retval None
*/
static void MX_USB_OTG_FS_PCD_Init(void)
{
/* USER CODE BEGIN USB_OTG_FS_Init 0 */
/* USER CODE END USB_OTG_FS_Init 0 */
/* USER CODE BEGIN USB_OTG_FS_Init 1 */
/* USER CODE END USB_OTG_FS_Init 1 */
hpcd_USB_OTG_FS.Instance = USB_OTG_FS;
hpcd_USB_OTG_FS.Init.dev_endpoints = 6;
hpcd_USB_OTG_FS.Init.speed = PCD_SPEED_FULL;
hpcd_USB_OTG_FS.Init.phy_itface = PCD_PHY_EMBEDDED;
hpcd_USB_OTG_FS.Init.Sof_enable = ENABLE;
hpcd_USB_OTG_FS.Init.low_power_enable = DISABLE;
hpcd_USB_OTG_FS.Init.lpm_enable = DISABLE;
hpcd_USB_OTG_FS.Init.battery_charging_enable = ENABLE;
hpcd_USB_OTG_FS.Init.use_dedicated_ep1 = DISABLE;
hpcd_USB_OTG_FS.Init.vbus_sensing_enable = ENABLE;
if (HAL_PCD_Init(&hpcd_USB_OTG_FS) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USB_OTG_FS_Init 2 */
/* USER CODE END USB_OTG_FS_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
HAL_PWREx_EnableVddIO2();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, LD3_Pin|LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(USB_PowerSwitchOn_GPIO_Port, USB_PowerSwitchOn_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : PushSW_Pin */
GPIO_InitStruct.Pin = PushSW_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(PushSW_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : LD3_Pin LD2_Pin */
GPIO_InitStruct.Pin = LD3_Pin|LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : USB_OverCurrent_Pin */
GPIO_InitStruct.Pin = USB_OverCurrent_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(USB_OverCurrent_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : USB_PowerSwitchOn_Pin */
GPIO_InitStruct.Pin = USB_PowerSwitchOn_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(USB_PowerSwitchOn_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */