タイマーによる定時処理をSTM32CubeIDEの環境でHALを使って実装していきます。Timerはマイコンのクロック周波数とPreScaler, タイマーのカウントアップ値によって動作が決まってくるので、順を追って設定していきます。今回は10ms間隔で動作するようにします。全体のソースコードは記事の一番下にあります。
作業の流れ
以下の通り作業していきます。タイマーで呼び出される関数のところは少し手間がかかります。
- タイマーの動作周波数の設定
- タイマーのプリスケーラなどの設定
- タイマーで呼び出される関数を書く
今回用いるボード
今回もnucleo-496ZGです。
日本のAmazonでは売っていなかったので代わりにSTM32F446REを貼り付けておきます。基本は同じはずです。
1.タイマーの動作周波数の設定
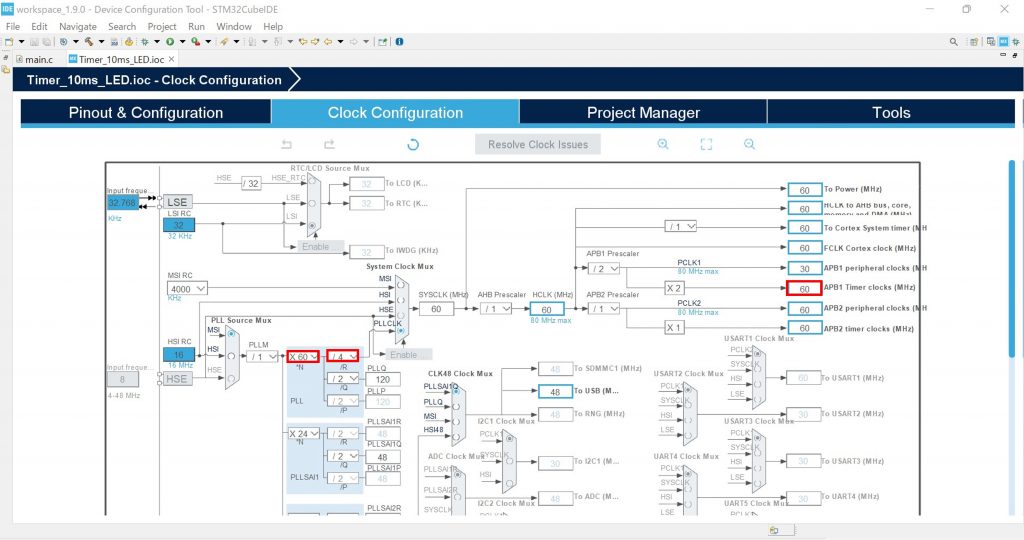
まずはメインクロックを設定しましょう。プロジェクトの.iocファイルをダブルクリックしてConfigurationを開きましょう。今回は計算を簡単にするためにtimerの動作周波数を60MHzにします。Timer2を使っていきます。
マイコンの仕様書によるとTimer2はAPB1の周波数で動いています。

https://www.st.com/resource/en/datasheet/stm32l496zg.pdf
従ってAPB1が60MHzになるようにします。下記のように設定しました。
| 変数 | 設定値 |
|---|---|
| *N | 60 |
| /R | /4 |
| APB1 Timer clocks | 結果的に60MHz |
2. タイマーのプリスケーラなどの設定
次にプリスケーラとカウント値を設定してきます。まずはPinout & configurationでTimer2のClock SourceをInternal Clockにしてtimerを有効化します。
Pinout & Configuration

次にCounter PeriodとPrescalerを設定していきます。今回は10ms = 0.01secで動作して欲しいので、100と6000にするのですが、設定した値を超えた時、つまり次のステップで割り込みが発生するため、どちらも-1しておきます。すごく大まかに割り込み処理の動作タイミングを書くと以下のようになります。
$$割り込み処理間隔 [s] = \frac{(Prescaler)* (Counter Period)}{Timer clocks} = \frac{(100) * (6000)}{60000000} = 0.01 [s] $$
デフォルトの値のままのものも含めて、設定項目は下の表のようになっています。
Parameter Settingsタブ
Counter Settings
| Prescaler | 100-1 |
| Counter Mode | Up |
| Counter Period | 6000-1 |
| Internal Clock Division | No Division |
| auto-reload preload | Enable |
Trigger Output Parameters
| Master/Slave Mode | Disable |
NVIC Settings
| NVIC Interrupt Table | Enabled | Preemption Priority | Sub Priority |
|---|---|---|---|
| TIM2 global interrupt | ✔ (yes) | 0 | 0 |
ここまで設定したら「Ctrl + s」で保存してCode generationしましょう。
3. タイマーで呼び出される関数を書く
今回はLEDをONOFFする関数を簡単に書いてみたいと思います。ここまでの設定がうまくいっていればメイン関数の40行目あたりのPrivate variablesにTIM_HandleTypeDef htim2が追加されているはずです。
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef hlpuart1;
TIM_HandleTypeDef htim2;
PCD_HandleTypeDef hpcd_USB_OTG_FS;
先ほどのプリスケーラなどの設定は210行目あたりにあるかと思います。
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 100-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 6000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}タイマの割り込み関数はメイン関数にはないので、CallBackを探してプログラムを書かないといけません。
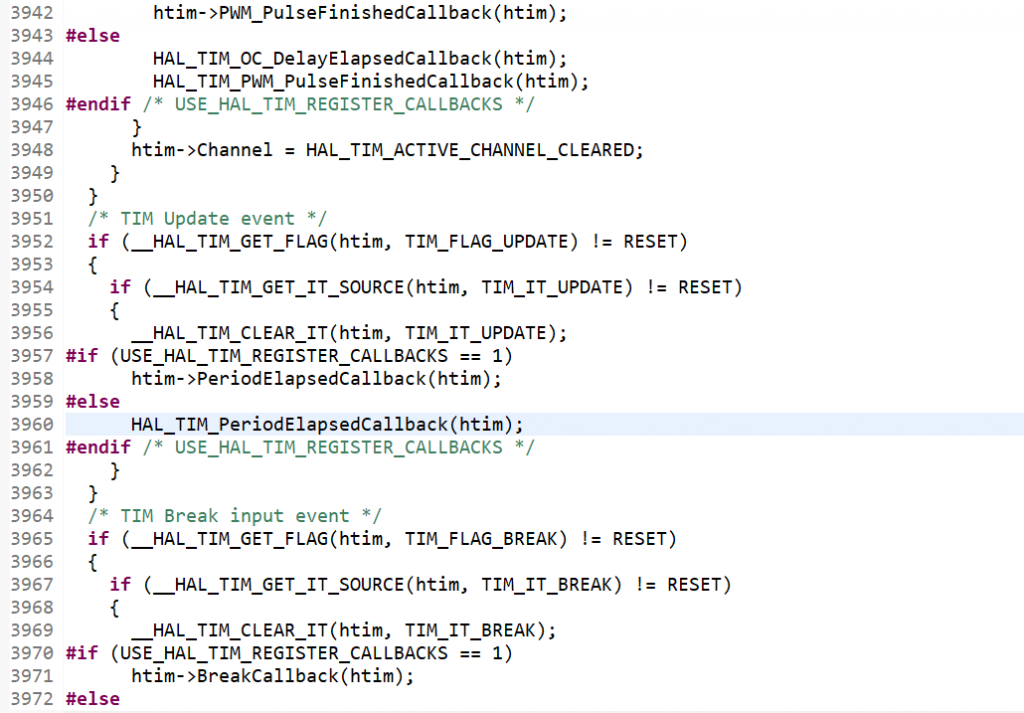
stm32l4xx_it.cの中には304行目くらいにTIM2_IRQHandler(void)という関数があります。その中のHAL_TIM_IRQHandlerを右クリックして定義を探すと、Drivers>STM32L4xx_HAL_Driver>Src>stm32l4xx_hal_tim.cのファイル内の3951行目のTIM Update eventの中にHAL_TIM_PeriodElapsedCallbackが見つかります。このCallBackを使います。

このCallbackをユーザー関数として定義します。USER CODE BEGIN 4に書きました。中身はtimerのupdateが入ったらこのcallbackを実行し、実行したときにtimer2だったらGPIOのLEDのONOFFを反転させるという内容です。
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
if(htim == &htim2){
HAL_GPIO_TogglePin(GPIOB, LD3_Pin);
}
}4. タイマーを起動する
※2022/8/24追記 下のソースコードには書いてあるものの、説明が記載できていませんでした。
タイマーを使用する場合、タイマーを起動する必要があります。
比較的上部のUser Code2に以下のコマンドを記入します。
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
以上で設定完了です。
他に実装する処理の都合上、今回は10msで組んでしまいましたが、LEDを10ms間隔でON/OFFしても点灯しているように見えてしまうので、100ms間隔などに変更した方が良いかもしれません。
参考サイト
今回はこちらのサイトにお世話になりました。
STM32 Timer Interrupt HAL Example – Timer Mode LAB
本日は以上です。ご覧いただきありがとうございました。
今回のソースコードを載せておきます。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef hlpuart1;
TIM_HandleTypeDef htim2;
PCD_HandleTypeDef hpcd_USB_OTG_FS;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_LPUART1_UART_Init(void);
static void MX_USB_OTG_FS_PCD_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_LPUART1_UART_Init();
MX_USB_OTG_FS_PCD_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
Error_Handler();
}
/** Configure LSE Drive Capability
*/
HAL_PWR_EnableBkUpAccess();
__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSE|RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.LSEState = RCC_LSE_ON;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = 0;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_6;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;
RCC_OscInitStruct.PLL.PLLM = 1;
RCC_OscInitStruct.PLL.PLLN = 60;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
/** Enable MSI Auto calibration
*/
HAL_RCCEx_EnableMSIPLLMode();
}
/**
* @brief LPUART1 Initialization Function
* @param None
* @retval None
*/
static void MX_LPUART1_UART_Init(void)
{
/* USER CODE BEGIN LPUART1_Init 0 */
/* USER CODE END LPUART1_Init 0 */
/* USER CODE BEGIN LPUART1_Init 1 */
/* USER CODE END LPUART1_Init 1 */
hlpuart1.Instance = LPUART1;
hlpuart1.Init.BaudRate = 209700;
hlpuart1.Init.WordLength = UART_WORDLENGTH_7B;
hlpuart1.Init.StopBits = UART_STOPBITS_1;
hlpuart1.Init.Parity = UART_PARITY_NONE;
hlpuart1.Init.Mode = UART_MODE_TX_RX;
hlpuart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
hlpuart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
hlpuart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&hlpuart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN LPUART1_Init 2 */
/* USER CODE END LPUART1_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 100-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 6000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief USB_OTG_FS Initialization Function
* @param None
* @retval None
*/
static void MX_USB_OTG_FS_PCD_Init(void)
{
/* USER CODE BEGIN USB_OTG_FS_Init 0 */
/* USER CODE END USB_OTG_FS_Init 0 */
/* USER CODE BEGIN USB_OTG_FS_Init 1 */
/* USER CODE END USB_OTG_FS_Init 1 */
hpcd_USB_OTG_FS.Instance = USB_OTG_FS;
hpcd_USB_OTG_FS.Init.dev_endpoints = 6;
hpcd_USB_OTG_FS.Init.speed = PCD_SPEED_FULL;
hpcd_USB_OTG_FS.Init.phy_itface = PCD_PHY_EMBEDDED;
hpcd_USB_OTG_FS.Init.Sof_enable = ENABLE;
hpcd_USB_OTG_FS.Init.low_power_enable = DISABLE;
hpcd_USB_OTG_FS.Init.lpm_enable = DISABLE;
hpcd_USB_OTG_FS.Init.battery_charging_enable = ENABLE;
hpcd_USB_OTG_FS.Init.use_dedicated_ep1 = DISABLE;
hpcd_USB_OTG_FS.Init.vbus_sensing_enable = ENABLE;
if (HAL_PCD_Init(&hpcd_USB_OTG_FS) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USB_OTG_FS_Init 2 */
/* USER CODE END USB_OTG_FS_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
HAL_PWREx_EnableVddIO2();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, LD3_Pin|LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(USB_PowerSwitchOn_GPIO_Port, USB_PowerSwitchOn_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : LD3_Pin LD2_Pin */
GPIO_InitStruct.Pin = LD3_Pin|LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : USB_OverCurrent_Pin */
GPIO_InitStruct.Pin = USB_OverCurrent_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(USB_OverCurrent_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : USB_PowerSwitchOn_Pin */
GPIO_InitStruct.Pin = USB_PowerSwitchOn_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(USB_PowerSwitchOn_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
if(htim == &htim2){
HAL_GPIO_TogglePin(GPIOB, LD3_Pin);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */