なるべく安価なマイコンでCAN通信をする必要が出てきたため、STM32F1103を使ってCAN通信をすることにしました。よく記事になっているMPC2551は型番が古く使用非推奨となっているため、新しいチップであるMCP2651でCAN通信をしてみました。PIN配がかわっているものの、使い方は比較的優しいかと思います。今回は接続とCAN送信に絞って話を書いていきたいと思います。CAN通信の周期は500kbpsで行っています。
今回使用したもの
探すと色々出てくると思いますが、一例としてリンクを載せておきます。



MCP2561について
MCP2561はMCP2551の後継として出されているCANの高速トランシーバです。公式のリファレンスはこちら。公式のリファレンスによると、PIN配は下記のようになっています。
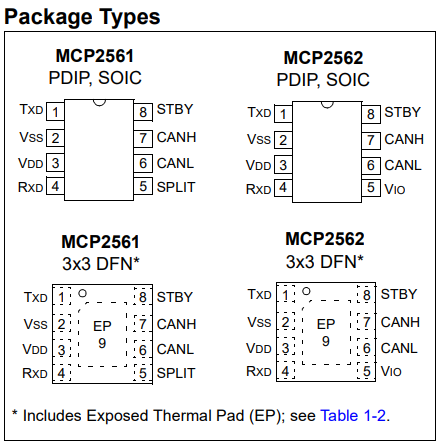
ここでVDDは5V電源、VSSはGNDに接続します。MPC2561の場合、VDDに5Vを印可すると、RxDの電圧も5Vとなってしまうので、3.3Vで駆動するSTM32F103C8T6とは相性が少し悪いです。SPLITを使わないのであればMCP2562にして、VIOにマイコン(STM32F103C8T6)と同じ電源を与えるほうが接続としてはすっきりするかと思います。今回はダイオードとプルアップ抵抗で処理をしてSTM32F103C8T6とMPC2561の組み合わせでCAN通信をしていきます。
STM32F103C8T6とMCP2561の接続
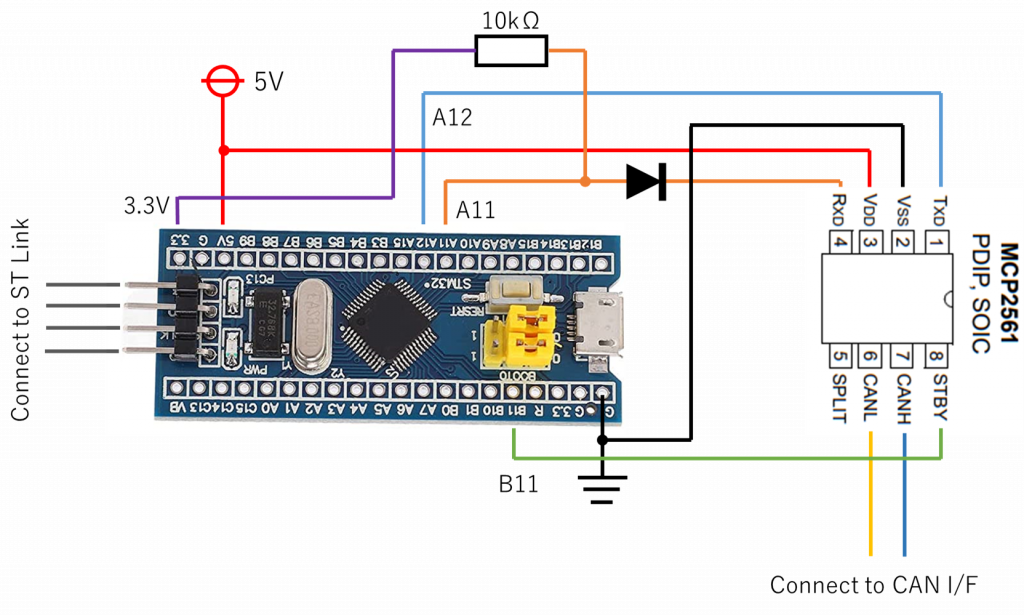
以下の図のように接続します。先ほどのRxDの電圧が合わない問題はダイオードと抵抗で回避し、STBYの動作をさせるためにPB11のポートを使っています。この配線にてCAN通信可能なはずです。今回はCAN-USB Interfaceには中国製の2000円程度の基盤を用い、SavvyCANでCANデータを見ました。
実装するプログラム
実装するプログラムはこちらのサイトを基に設定しました。MCP2561を用いているため、起動時にPB11からSTBY信号をLowに落とす必要があるためその部分を追加しています。また動作していることがわかるようにPC13のLEDも光らせています。
1. マイコンのIO設定
まずはマイコンのIOの設定をします。以下の図のように変更しました。

2. マイコンの動作周期設定
下図のように外部の水晶振動子を用いる設定にし、マイコンの基本動作周波数を72MHz, APB1を36MHzとします。
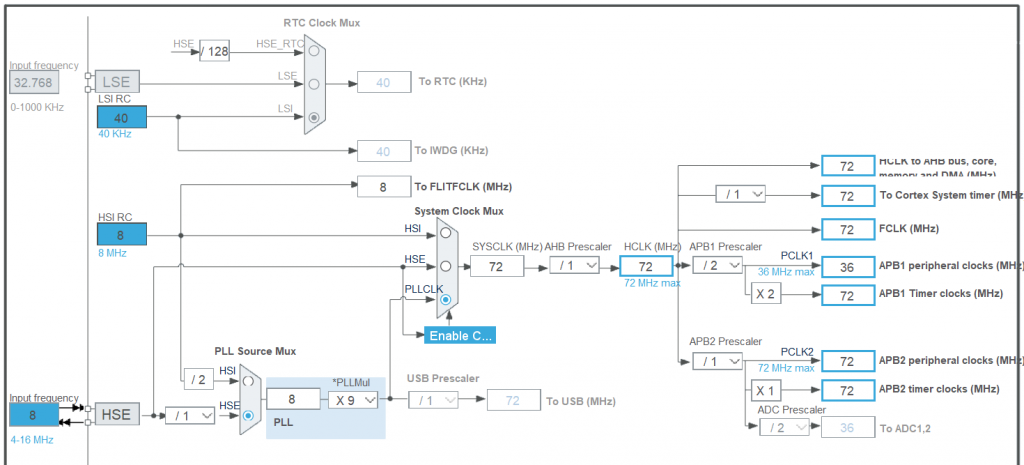
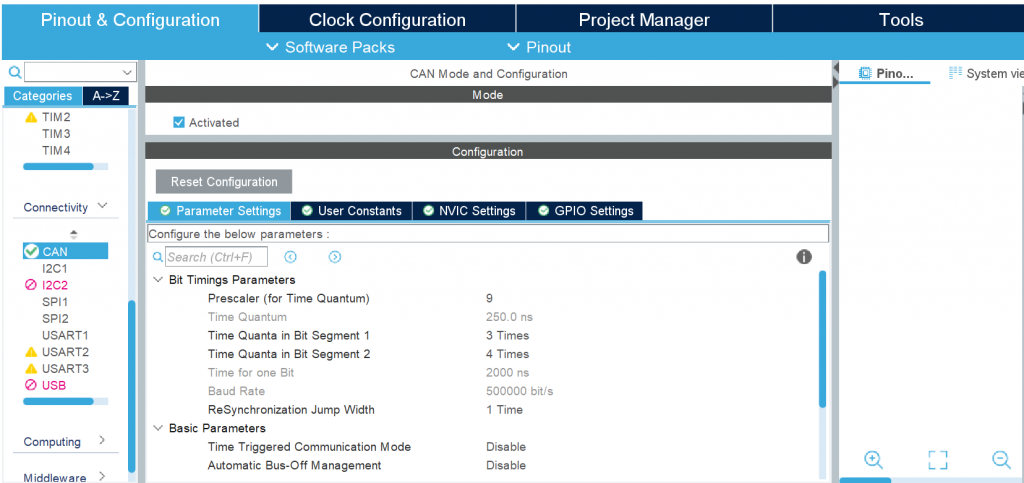
3. CANの通信周期設定
今回は500kbpsに設定するために下記のように行いました。
CANの送信時の1bitの時間は以下のように計算されます。
(1bitの時間)= TQ + (TQ*TQBit1) + (TQ*TQBit2)
ここで TQ: Time Quantum, TQBit1: Time Quantum in Bit Segment1, TQBit2: Time Quantum in Bit Segment2
最初のPrescalerを9とするとTQ = 250nsとなります。
そしてTQBit1 =3, TQBit2 = 4を設定すると(1bitの時間)= 2000ns = 500kbpsとなります。
4. CAN送信部分のプログラム
まずはcanのハンドルを定義します。(42行目)
その後tx headerとcanMailboxを定義します。(47, 51行目)
そしてtx headerにCANIDやデータ長などの情報を入れます。(114-119行目)
最後にcsend(138行目)に送信したいデータの内容を入れて、HAL_CAN_AddTxMessage(139行目)で送信します。
最後にソースコード全文です。
このコードでCANを送信することができました。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
CAN_HandleTypeDef hcan;
/* USER CODE BEGIN PV */
/* add user code */
CAN_RxHeaderTypeDef rxHeader; //CAN Bus Transmit Header
CAN_TxHeaderTypeDef txHeader; //CAN Bus Receive Header
uint8_t canRX[8] = {0,0,0,0,0,0,0,0}; //CAN Bus Receive Buffer
CAN_FilterTypeDef canfil; //CAN Bus Filter
uint32_t canMailbox; //CAN Bus Mail box variable
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_CAN_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN_Init();
/* USER CODE BEGIN 2 */
/* add user code */
canfil.FilterBank = 0;
canfil.FilterMode = CAN_FILTERMODE_IDMASK;
canfil.FilterFIFOAssignment = CAN_RX_FIFO0;
canfil.FilterIdHigh = 0;
canfil.FilterIdLow = 0;
canfil.FilterMaskIdHigh = 0;
canfil.FilterMaskIdLow = 0;
canfil.FilterScale = CAN_FILTERSCALE_32BIT;
canfil.FilterActivation = ENABLE;
canfil.SlaveStartFilterBank = 14;
txHeader.DLC = 8;
txHeader.IDE = CAN_ID_STD;
txHeader.RTR = CAN_RTR_DATA;
txHeader.StdId = 0x030;
//txHeader.ExtId = 0x02;
txHeader.TransmitGlobalTime = DISABLE;
HAL_CAN_ConfigFilter(&hcan,&canfil);
HAL_CAN_Start(&hcan);
HAL_CAN_ActivateNotification(&hcan,CAN_IT_RX_FIFO0_MSG_PENDING);
/* GPIO PIN 11 をRESETにすることでCANトランシーバを起動 */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_11, GPIO_PIN_RESET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* add code 2023/1/16 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
//HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_11);
uint8_t csend[] = {0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08};
HAL_CAN_AddTxMessage(&hcan,&txHeader,csend,&canMailbox);
//if(HAL_CAN_AddTxMessage(&hcan,&txHeader,csend,&canMailbox)!= HAL_OK){
// Error_Handler();
//};
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief CAN Initialization Function
* @param None
* @retval None
*/
static void MX_CAN_Init(void)
{
/* USER CODE BEGIN CAN_Init 0 */
/* USER CODE END CAN_Init 0 */
/* USER CODE BEGIN CAN_Init 1 */
/* USER CODE END CAN_Init 1 */
hcan.Instance = CAN1;
hcan.Init.Prescaler = 9;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_3TQ;
hcan.Init.TimeSeg2 = CAN_BS2_4TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
if (HAL_CAN_Start(&hcan) != HAL_OK) {
Error_Handler();
}
/* USER CODE END CAN_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_11, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : PB11 */
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* add CAN receive Callback 2023/1/16 Nishihashi */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan1)
{
HAL_CAN_GetRxMessage(hcan1, CAN_RX_FIFO0, &rxHeader, canRX);
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_3);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
HAL_Delay(500);
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
ご覧いただきありがとうございました。今回はCAN送信部分だけでしたが、そのうちCAN受信部分もやってみようと思います。